

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
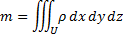
1) Масса и статические моменты тела.
Пусть тело занимает объем  и его объемная плотность в точке
и его объемная плотность в точке  задана функцией
задана функцией  . Тогда масса тела
. Тогда масса тела  вычисляется с помощью тройного интеграла:
вычисляется с помощью тройного интеграла:
Статические моменты тела относительно координатных плоскостей  ,
,  ,
,  :
:

Координаты центра тяжести тела вычисляются по формулам:

2) Моменты инерции тела.
Моменты инерции тела относительно координатных плоскостей  , , :
, , :

Моменты инерции тела относительно координатных осей  ,
,  ,
,  :
:

Моментом инерции тела относительно начала координат называется интеграл:

3) Тензор инерции.
Матрица инерции или тензор инерции тела:

4) Гравитационный потенциал и сила тяготения.
Ньютоновым потенциалом тела в точке  называется интеграл:
называется интеграл:

где  – плотность тела.
– плотность тела.
Интегрирование выполняется по всему объему тела. Зная потенциал, можно вычислить силу притяжения материальной точки массы и заданного распределенного тела с плотностью по формуле:

где  – гравитационная постоянная.
– гравитационная постоянная.  .
.
Криволинейные интегралы.
Криволинейные интегралы 1 и 2 рода, их вычисление и приложения. Формула Остроградского-Гаусса, Грина, Стокса
Криволинейные интегралы 1–го рода.
Определение.
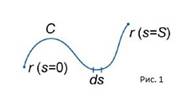
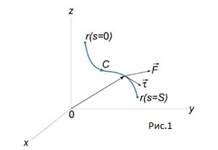
Пусть кривая  описывается векторной ф.
описывается векторной ф.  , причём
, причём  , где переменная
, где переменная  – длина дуги кривой (Рис.1).
– длина дуги кривой (Рис.1).
Если на кривой определена скалярная функция  , то интеграл
, то интеграл  называется криволинейным интегралом первого рода от скалярной ф. вдоль кривой и обозначается:
называется криволинейным интегралом первого рода от скалярной ф. вдоль кривой и обозначается:
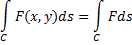
Криволинейный интеграл  , если ф. непрерывна на кривой .
, если ф. непрерывна на кривой .
Свойства криволинейного интеграла первого рода:
1) Интеграл не зависит от ориентации кривой;
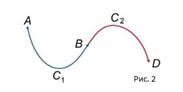
2) Пусть кривая  начинается в т.
начинается в т.  и заканчивается в т.
и заканчивается в т.  , а кривая
, а кривая  начинается в т. и заканчивается в т.
начинается в т. и заканчивается в т.  (Рис. 2). Тогда их объединением будет кривая
(Рис. 2). Тогда их объединением будет кривая  , которая проходит от к вдоль кривой и затем от к вдоль кривой . Тогда справедливо соотношение:
, которая проходит от к вдоль кривой и затем от к вдоль кривой . Тогда справедливо соотношение:
3) Если гладкая кривая задана параметрически соотношением  , причём
, причём  и скалярная ф. непрерывна на кривой , то:
и скалярная ф. непрерывна на кривой , то:

4) Если гладкая кривая в плоскости определена ур.  , причём
, причём  , то:
, то:

5) Если гладкая кривая в плоскости определена ур.  , причём
, причём  , то:
, то:

6) В полярных координатах интеграл  выражается формулой:
выражается формулой:
где задана в полярных координатах ф.  , причём
, причём  .
.
 Криволинейные интегралы 2–го рода.
Криволинейные интегралы 2–го рода.
Определение.
Пусть кривая описывается векторной ф. , причём , где переменная – длина дуги кривой. Тогда производная векторной ф.:  представляет собой единичный вектор, направленный вдоль касательной к данной кривой (Рис 1.)
представляет собой единичный вектор, направленный вдоль касательной к данной кривой (Рис 1.)
В приведенной выше формуле  ,
,  и
и  – углы между касательной и положительными направлениями осей ,
– углы между касательной и положительными направлениями осей ,  и
и  , соответственно.
, соответственно.
Введем векторную функцию  , определенную на кривой , так, чтобы для скалярной функции:
, определенную на кривой , так, чтобы для скалярной функции:  существовал криволинейный интеграл:
существовал криволинейный интеграл:  . Такой интеграл называется криволинейным интегралом второго рода от векторной функции
. Такой интеграл называется криволинейным интегралом второго рода от векторной функции 
вдоль кривой C и обозначается как:  . Таким образом:
. Таким образом:

в векторной форме:

где  .
.
Свойства криволинейного интеграла второго рода:
1) Пусть обозначает кривую с началом в точке и конечной точкой . Обозначим через
кривую противоположного направления от к . Тогда:
2) Если объединение кривых и , то:

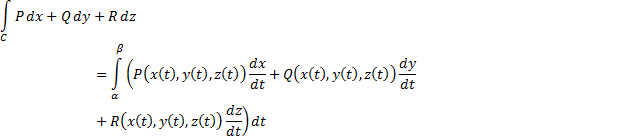
3) Если кривая задана параметрически в виде:  , , то:
, , то:
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

