Допустим, одновременно взяты компасные пеленги трех предметов Л, В и С и линии соответствующих истинных пеленгов ИПА, ИПВ и ИПС проложены на карте (рис. 97). Ясно, что если
 ленгам трех предметов.
ленгам трех предметов.
|
наблюдения правильны и принятая поправка компаса верна, то линии всех трех пеленгов должны пересечься в одной и той же точке, так как истинное место судна не может находиться одновременно в разных точках.
Если же в наблюдениях или принятых величинах допущена ошибка, то линии пеленгов пересекутся в трех точках, образуя между собой так называемый треугольник погрешностей (рис. 98). Причиной появления треугольника погрешностей наиболее часто является неверное значение величины (а иногда и знака) поправки компаса. При этом, если треугольник погрешностей относительно мал, т. е. ни одна из его сторон не превосходит 0,5 мили на карте, по которой ведется прокладка, то место судна принимают в его центре. Если треугольник мал, но вытянут, то место судна считают в точке, близкой к его короткой стороне.
В том случае, если стороны треугольника погрешностей больше указанных размеров, следует заново исправить компасные пеленги, постепенно увеличивая или уменьшая поправку компаса на 2—3°. Если треугольник начнет уменьшаться, то следует больше изменить поправку в ту же сторону, пока он не исчезнет. Если же он станет увеличиваться, то поправку изменяют в обратную сторону.
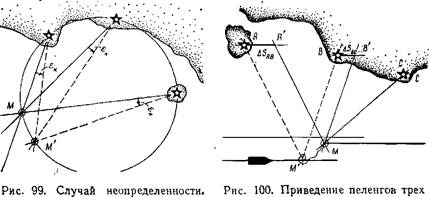
Однако при условии правильных и достаточно одновременных наблюдений возможен случай, когда линии всех трех пеленгов пересекутся в одной точке как при верной, так и при неверной поправке компаса, не вызывая сомнений в правильности обсервации. Так будет, если все три ориентира и само судно расположены на одной и той же окружности (рис. 99).
Линии верных пеленгов ИПА, ИПВ и ИГ1С пересекаются в точке М действительного места судна, а линии неверных пеленгов —ип'А, ип'в и ип'с пересекаются также в одной и той же, но другой точке М'. Поэтому если пеленгуемые предметы и счис-
 предметов к одному месту.
предметов к одному месту.
|
лимое место судна оказались на карте на одной и той же окружности, то определение места производят заново, т. е. с другой точки местонахождения судна.
В способе трех пеленгов первым следует пеленговать предмет, ближайший к линии истинного курса судна. Момент времени и отсчет лага замечают при пеленговании предмета, пеленг которого наиболее быстро изменяется, т. е. ближайшего к траверзу судна.
Неодновременность пеленгования всех трех ориентиров при скорости хода судна более 12 узлов тоже может вызвать появление треугольника погрешностей на карте. В этом случае необходимо привести наблюдения к одному месту или одному моменту. Допустим, мы взяли один за другим пеленги предметов Л, В и С (рис. 100). Здесь линии пеленгов первых двух предметов показаны пунктиром. Для приведения пеленгов к одному месту измеряют секундомером промежутки времени tAB между моментами взятия пеленгов предметов Л и В и tBC между моментами взятия пеленгов предметов В и С. По этим промежуткам времени и скорости хода судна рассчитывают отрезки плаваний ASAB и ASBC между моментами пеленгования соответствующих ориентиров. Затем из точек Л и В параллельно линии истинного курса проводят прямые и на них откладывают величины ASAB и ASBC, получая точки Л' и В'. Проложенные из полученных точек параллельные соответственно линиям пеленгов на предметы Л и В представят линии этих пеленгов, приведенных к одному месту.
Для приведений наблюдений к одному моменту пеленгуют ориентиры в следующей последовательности. Берут пеленг первого предмета КПА, потом второго кп'в и третьего КПС- В момент взятия пеленга третьего предмета замечают момент времени и отсчет лага. Затем повторно берут пеленг второго предмета кп"в и пеленг первого КПА. Считая, что пеленги изменяются пропорционально времени, рассчитывают среднеарифметические значения пеленгов КПЛ первого предмета и /(77в второго:
кпкпА + кпАиКкпв + кп"в Л 2 в 2
Определение по трем пеленгам будет тем точнее, чем ближе углы аир между линиями пеленгов к 60 или 120°. Однако они должны быть не менее 30 и не более 150°.
 Рис. 101. Определение места по двум горизонтальным углам.
Рис. 101. Определение места по двум горизонтальным углам.
|
Способ определения места судна по трем пеленгам обладает большим преимуществом перед способом определения по двум пеленгам, он дает возможность судить о правильности обсервации.








