На рис. 19 представлена структура комбинированного регулятора. Суть этого регулирования заключается в том, что закон регулирования включает два принципа регулирования: по отклонению и по возмущению. Синтез систем с компенсацией возмущения рассматривается в различных монографиях [15, 16, 35 (с. 223-229), 19 (с. 326-339), 94, 98, 99]. Автор обращает внимание читателей на безударные переключения режимов работы комбинированного регулятора.

Рис. 19. Структура комбинированного регулятора
F – возмущение; Fi – текущее значение контролируемого возмущения; Fo – начальное (базовое) значение возмущения, которое формируется в момент включения регулятора или перехода из ручного режима в автоматический; Ux – выход регулятора по отклонению; UF – выход регулятора по возмущению; Ue1 – выход регулятора по отклонению; DF – зона нечувствительности по каналу возмущения; КF – коэффициент компенсации возмущения F; Fо – начальное (базовое) значение контролируемого возмущения перед переключением регулятора в автоматический режим; Х – регулируемая величина; Хздн – значение задания регулятору; Wp (P) – передаточная функция регулятора; Wоу (Р) – передаточная функция объекта управления.
Базовое значение формируется в момент включения регулятора в автоматический режим. Выражение формируемого возмущения будет иметь вид  , а не КF, как обычно приводят в литературе. Fi – величина контролируемого возмущения. Кроме того, автор считает, что в регуляторе может использовать косвенный параметр. Например, при регулировании температуры воды на выходе теплообменника Х возмущение может вызвать не столько расход холодной воды перед теплообменником, сколько теплота, которую несёт возмущение F. То есть в качестве F может выступать произведение расхода на температуру и на теплоёмкость.
, а не КF, как обычно приводят в литературе. Fi – величина контролируемого возмущения. Кроме того, автор считает, что в регуляторе может использовать косвенный параметр. Например, при регулировании температуры воды на выходе теплообменника Х возмущение может вызвать не столько расход холодной воды перед теплообменником, сколько теплота, которую несёт возмущение F. То есть в качестве F может выступать произведение расхода на температуру и на теплоёмкость.
Если применяется комбинированный закон регулирования: по отклонению и по контролируемому возмущению [22], то необходимо обеспечить безударность перехода с ручного режима управления на автоматический как по каналу отклонения, так и по каналу контролируемого возмущающего воздействия. В этом случае базовое значение Fо, формируемое в момент включения регулятора в автоматический режим, равно текущему значению возмущения Fо = Fi. Значение управления по возмущению будет определяться по формуле . В ручном режиме работы включается режим слежения по обоим каналам: по каналу отклонения Хздн = Xi и по каналу возмущения F0 = Fi. По каналу отклонения и возмущения устанавливается своя зона нечувствительности (DX и DF). Величина зоны нечувствительности зависит от погрешности измерительного канала и может быть оценена по формуле
DX» 3sx; DF» 3sF,
где sx – погрешность измерительного канала; sF – погрешность канала возмущения.
Рассмотрим ситуацию, которая может привести к возникновению удара. Это ступенчатое изменение задания регулятору. Например, при регулировании расхода жидкости недопустимо резкое прикрытие отверстия между седлом и затвором исполнительного механизма. При ступенчатом уменьшении задания ПИ-регулятору исполнительный механизм начнёт сразу отрабатывать пропорциональную и интегральную составляющие. Резкое перекрытие потока жидкости может вызвать гидравлический удар. Рассмотрим другой случай: регулирование соотношения газ/воздух перед горелкой газовой печи. Резкое увеличение расхода воздуха может привести к срыву пламени после горелки. С целью исключения таких моментов следует предусмотреть в алгоритме возможность плавного изменения задания регулятору. При этом оператор может вводить задание ступенчато. Для реализации плавного перехода с одного задания на другое в алгоритм регулятора вводят признак плавного перехода с одного значения задания на другое. В контроллере Р-130 этот признак назвали «динамической балансировкой». Статическая и динамическая балансировки устанавливаются в алгоритме ЗДН (рис. 7).
На рис. 20 представлена программа (COMBR-2.REM) на языке FBD комбинированного регулятора с переменной структурой; алгоритмы, с помощью которых реализован комбинированный регулятор. Регулятор по отклонению реализован в следующих алгоблоках: 7, 8, 9 и 10. Регулятор по возмущению реализован включает алгоблоки: 14, 15, 16 и 17. В алгоблоках 11, 13, 20, 21 и 22 реализуется алгоритм безударного подключения или отключения регулятора по возмущению. Под переменной структурой в этом регуляторе понимается следующее. В процессе работы возможно изменение структуры регулятора. Можно к регулятору по отклонению и подключить регулятор по возмущению, тогда получим комбинированный регулятор. Следует отметить, что эти переключения происходят безударно.
В обоих регуляторах предусмотрена зона нечувствительности. С помощью алгоритма слежения СЛЗ, алгоблок 14, осуществляется первоначальное безударное подключение регулятора по возмущению. Хотя, как было указано в работе [27, с. 80-82], одного одновибратора (ОДВ) не достаточно для реализации безударного подключения регулятора по возмущению.
Программу, представленную на рис. 20, можно упростить. Кроме того, в программе имеется техническая ошибка, суть которой была раскрыта в пособии [27, с. 82]. Автор предлагает упростить программу и устранить ошибку. Эти небольшие ошибки должны исключить слепое копирование программ.
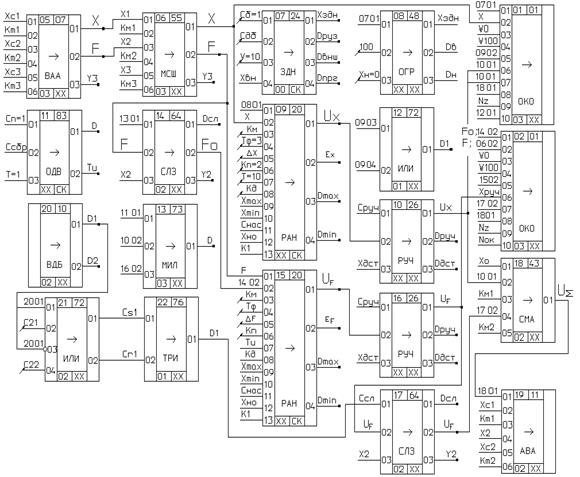
Рис. 20. Программа комбинированного регулятора
В табл. 5 приведена расшифровка алгоритмов, использованных в программе (рис. 20).
Таблица 5
| Номер
алгоблока
| Шифр
алгоритма
| Комментарии
|
|
| ОКО
| Алгоритм оперативного контроля позволяет контролировать все параметры регулятора по отклонению.
|
|
| ОКО
| Контроль параметров регулятора по отклонению.
|
|
| ВАА
| Ввод аналоговых сигналов по группе А (X и F).
|
|
| МСШ
| Алгоритм масштабирования. Используется в качестве промежуточного клеммника.
|
|
| ЗДН
| Алгоритм формирования задания регулятору по отклонению.
|
|
| ОГР
| Алгоритм ограничения вводимого задания.
|
|
| РАН
| Регулятор аналоговый стандартный (ПИ-регулятор по отклонению). На выходе регулятора имеем сигнал Ux.
|
Окончание таблицы 5
|
| РУЧ
| Алгоритм ручного управления. Служит для отключения регулятора по отклонению и перехода на ручной[16] режим регулирования.
|
|
| ОДВ
| Одновибратор предназначен для формирования единичного импульса после загрузки программы в память контроллера.
|
|
| ИЛИ
| Объединяет признаки выхода сигнала регулирования Ux за границы, установленные в РАН.
|
|
| МИЛ
| Многовходовое ИЛИ.
|
|
| СЛЗ
| Алгоритм слежения предназначен для безударного перехода с ручного режима в автоматический по каналу возмущения.
|
|
| РАН
| П-регулятор по каналу возмущения. На выходе регулятора формируется сигнал UF.
|
|
| РУЧ
| Алгоритм РУЧ для отключения регулятора по возмущению.
|
|
| СЛЗ
| Алгоритм слежения предназначен для безударного отключения или включения регулятора по каналу возмущения.
|
|
| СМА
| Сумматор предназначен для суммирования сигналов регулирования, поступающих с регулятора по отклонению и с регулятора по возмущению. (U∑ = Ux + UF)
|
|
| АВА
| Алгоритм выдачи сигнала регулирования U∑ на исполнительный механизм.
|
|
| ВДБ
| Алгоритм ввода дискретных сигналов по группе Б. По первому каналу вводится команда подключить регулятор по возмущению («1») или отключить («0»).
|
|
| ИЛИ
| Объединяет команду подключения регулятора по возмущению, поступающую через УСО (например, с имитатора), с такой же командой, но подаваемой с ПЭВМ (с АРМа оператора).
|
|
| ТРИ
| Триггер. Запоминается команда подключения регулятора по возмущению.
|
Имя программы: COMBR-2.rem
Дата создания отчета: 06/06/2009 (С.А.В.).
СИСТЕМНЫЕ ПАРАМЕТРЫ:
Системный номер контроллера: 2.
Модель контроллера: Регулирующая.
Временной диапазон контроллера: Младший (Cек/Мин).
Время цикла: 0,2 сек.
АЛГОРИТМЫ И КОНФИГУРАЦИЯ:
Таблица 6
| Ал. б.
| Алгоритм
| Мод
| МВ
| Вход
| Тип
| Значение
| Источник
|
| | | | | N Имя
| | | Ал. б. / Выход
|
|
| ОКО (01)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Xздн
|
|
| 7/1 (Хздн)
|
|
|
|
|
| 2 Xi
|
|
| 6/1 (X)
|
| Продолжение таблицы 6
|
|
|
|
|
| 3 W0
|
|
|
|
|
|
|
|
| 4 W100
|
|
|
|
|
|
|
|
| 5 Ex
|
|
| 9/2 (Ex)
|
|
|
|
|
| 6 Xруч
|
|
| 10/1 (Ux)
|
|
|
|
|
| 7 Xвр
|
|
| 10/1 (Ux)
|
|
|
|
|
| 8 Z
|
|
| 18/1 (Usum)
|
|
|
|
|
| 9 Nz
|
|
|
|
|
|
|
|
| 10 Nок
|
|
| 12/1 (D1)
|
|
| ОКО (01)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Xздн
|
|
| 14/2 (F0)
|
|
|
|
|
| 2 Xвх
|
|
| 6/2 (F)
|
|
|
|
|
| 3 W0
|
|
|
|
|
|
|
|
| 4 W100
|
|
|
|
|
|
|
|
| 5 EF
|
|
| 15/2 (EF)
|
|
|
|
|
| 6 Xруч
|
|
| 16/1 (UF)
|
|
|
|
|
| 7 Xвр
|
|
| 17/2 (UF)
|
|
|
|
|
| 8 Z
|
|
| 18/1 (Usum)
|
|
|
|
|
| 9 Nz
|
|
|
|
|
|
|
|
| 10 Nок
|
|
|
|
|
| ВАА (07)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Xc1
|
|
|
|
|
|
|
|
| 2 Km1
|
|
|
|
|
|
|
|
| 3 Xc2
|
|
|
|
|
|
|
|
| 4 Km2
|
|
|
|
|
| МСШ (55)
|
| –
|
|
|
|
|
|
|
|
|
| 1 X
|
|
| 5/1 (X)
|
|
|
|
|
| 2 Kм1
|
|
|
|
|
|
|
|
| 3 F
|
|
| 5/2 (F)
|
|
|
|
|
| 4 Kм2
|
|
|
|
|
| ЗДН (24)
|
| М
|
|
|
|
|
|
|
|
|
| 1 Сб = 1
|
|
|
|
|
|
|
|
| 2 Сдб
|
|
|
|
|
|
|
|
| 3 V = 10
|
|
|
|
|
|
|
|
| 4 Xвн
|
|
|
|
|
| ОГР (48)
| –
| –
|
|
|
|
|
|
|
|
|
| 1 X
|
|
| 7/1 (Xздн)
|
|
|
|
|
| 2 100
|
|
|
|
|
|
|
|
| 3 Xн = 0
|
|
|
|
|
| РАН (20)
| –
| М
|
|
| ПИ-регулятор
|
|
|
|
|
| 1 X1
|
|
| 8/1 (Xздн)
|
|
|
|
|
| 2 X2
|
|
| 6/1 (Xi)
|
|
|
|
|
| 3 Kм
|
|
|
|
|
|
|
|
| 4 Tф = 3
|
|
|
|
|
|
|
|
| 5 DX
|
|
|
|
|
|
|
|
| 6 Kп = 2
|
|
|
|
|
|
|
|
| 7 T = 10
|
|
|
|
|
|
|
|
| 8 Кд
|
|
|
|
| Продолжение таблицы 6
|
|
|
|
|
| 9 Xmax
|
|
|
|
|
|
|
|
| 10 Xmin
|
|
|
|
|
| РУЧ (26)
| –
| –
|
|
|
|
|
|
|
|
|
| 1 Сруч
|
|
|
|
|
|
|
|
| 2 Ux
|
|
| 9/1 (Ux)
|
|
|
|
|
| 3 Xдст
|
|
|
|
|
| ОДВ (83)
| –
| М
|
|
|
|
|
|
|
|
|
| 1 Cп = 1
|
|
|
|
|
|
|
|
| 2 Ссбр
|
|
|
|
|
|
|
|
| 3 T = 2
|
|
|
|
|
| ИЛИ (72)
|
| –
|
|
|
|
|
|
|
|
|
| 1 C11
|
|
| 9/3 (Dmax)
|
|
|
|
|
| 2 С21
|
|
| 9/4 (Dmin)
|
|
| МИЛ (73)
|
| –
|
|
|
|
|
|
|
|
|
| 1 C1
|
|
| 11/1 (D)
|
|
|
|
|
| 2 C2
|
|
| 10/2 (Dруч)
|
|
|
|
|
| 3 C3
|
|
| 16/2 (Dруч)
|
|
| СЛЗ (64)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Ccл
|
|
| 13/1 (D)
|
|
|
|
|
| 2 F
|
|
| 6/2 (F)
|
|
|
|
|
| 3 X2
|
|
| Резерв
|
|
| РАН (20)
| –
| М
|
|
| П-регулятор
|
|
|
|
|
| 1 F
|
|
| 6/2 (F)
|
|
|
|
|
| 2 F0
|
|
| 14/2(F0)
|
|
|
|
|
| 3 Kм
|
|
|
|
|
|
|
|
| 4 Tф
|
|
|
|
|
|
|
|
| 5 DF
|
|
|
|
|
|
|
|
| 6 Kп = 1
|
|
|
|
|
|
|
|
| 7 Tи
|
| INF 9999
|
|
|
|
|
|
| 8 Кд = 0
|
|
|
|
|
|
|
|
| 9 Xmax
|
|
|
|
|
|
|
|
| 10 Xmin
|
|
|
|
|
| РУЧ (26)
| –
| –
|
|
|
|
|
|
|
|
|
| 1 Сруч
|
|
|
|
|
|
|
|
| 2 UF
|
|
| 15/1(UF)
|
|
|
|
|
| 3 Xдст
|
|
|
|
|
| СЛЗ (64)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Ccл
|
|
| 22/1 (D1)
|
|
|
|
|
| 2 UF
|
|
| 16/1 (UF)
|
|
|
|
|
| 3 X2
|
|
| Резерв
|
|
| СМА (43)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Xo
|
|
|
|
|
|
|
|
| 2 X1
|
|
| 10/1 (Ux)
|
|
|
|
|
| 3 Kм1
|
|
|
|
|
|
|
|
| 4 X2
|
|
| 17/2 (UF)
|
|
|
|
|
| 5 Kм2
|
|
|
|
|
| АВА (11)
|
| –
|
|
|
|
|
Окончание таблицы 6
|
|
|
|
| 1 X1
|
|
| 18/1 (Usum)
|
|
|
|
|
| 2 Xc1
|
|
|
|
|
|
|
|
| 3 Km1
|
|
|
|
|
| ВДБ (10)
|
| –
|
|
|
|
|
|
| ИЛИ (72)
|
|
| 1 C11
|
|
| 20/1 (D1)
|
|
|
|
|
| 2 С21
|
|
|
|
|
|
|
|
| 3 C12
|
| инверсия
| 20/1 (D1)
|
|
|
|
|
| 4 С22
|
|
|
|
|
| ТРИ (76)
|
| –
|
|
|
|
|
|
|
|
|
| 1 Cs1
|
|
| 21/1 (D1)
|
|
|
|
|
| 2 Cr1
|
|
| 21/2 (D2)
|







