В режиме позиционирования различают:
- режим малых перемещений, при котором ни один из регуляторов не ограничен и система работает как линейная;
- режим средних перемещений, при котором ограничен якорный ток, т.е. ограничен выходной сигнал регулятора скорости;
- режим больших перемещений, при обработке которых двигатель в течении некоторого времени работает на установившейся скорости, т.е. все регуляторы некоторое время находятся в зоне ограничения.
 25.Особенности отработки средних и больших перемещений в позицонной системе
25.Особенности отработки средних и больших перемещений в позицонной системе
Позиционная система
Задачей позиционного АЭП является перемещение рабочего органа из одного положения в другое. Основной характеристикой этой системы является быстрота и точность отработки задающих сигналов. Т.к. в процессе отработки перемещения требуется контролировать ток и скорость двигателя на определенном уровне, то все современные позиционные системы АЭП являются трехконтурными с подчиненным регулированием параметров. Возможны три режима работы позиционного АЭП:
1) Режим малых перемещений, при котором не один из регуляторов не выходит на ограничение, т.е. система ведет себя как линейная.
2) Режим средних перемещений – в этом режиме регуляторы положения и скорости выходят на ограничение, т.е. система перестает быть линейной, но скорость в процессе отработки не выходит на максимальный установившийся уровень.
3) Режим больших перемещений – регуляторы положения и скорости выходят на ограничение, привод разгоняется до максимальной скорости, некоторое время на ней работает. Тахограмма режима больших перемещений имеет вид трапеции.
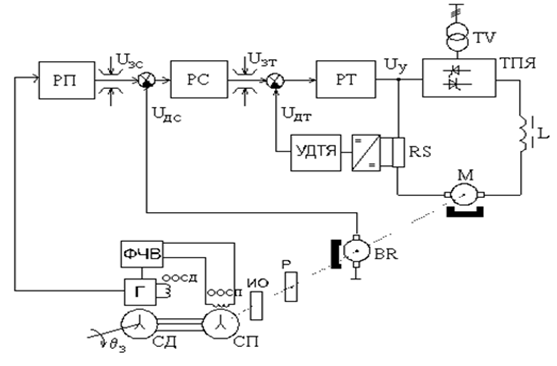
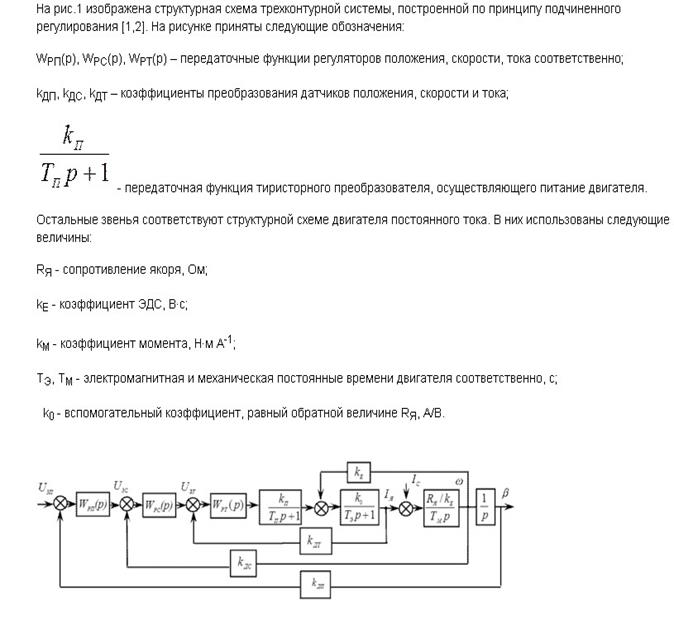
Функциональная схема аналоговой позиционной системы АЭП.
РП – регулятор положения; ФЧВ – фазочувствительный выпрямитель; Г – задающий генератор (f = 400¸1000Гц); СД, СП – сельсинная пара (сельсин-датчик и сельсин-приемник); ИО – исполнительный орган; Р – редуктор с передаточным числом i.
Особенность схемы: здесь используется датчик рассогласования на базе сельсинной пары и фазочувствительного выпрямителя – это датчик положения. В этой схеме нет электрических сигналов, пропорциональных задающей величине и сигналу фактического положения, но есть сигнал, пропорциональный рассогласованию, который определяется на выходе ФЧВ.
О работе сельсинной пары: переменное напряжение, подаваемое с генератора на обмотку сельсина-датчика, создает пульсирующее поле, которое в трехфазной обмотке, расположенной на роторе, наводит ЭДС (амплитуда каждой разности ЭДС зависит от угла между осью поля и осью фазных обмоток). Так как трехфазные обмотки сельсинов соединены, то токи, протекающие по этим цепям, создадут в сельсине-приемнике пульсирующее поле, которое наведет в его однофазной обмотке ЭДС.
Работа системы: Поворотом ротора сельсина-датчика формируется сигнал задания qЗАД. На ООСП наводится ЭДС соответствующей амплитуды, которая выпрямляется ФЧВ с приданием знака зависимости от знака от знака рассогласования. В результате для сигнала рассогласования на выходе РП сформируется сигнал задания на скорость UЗС, который также сформирует сигнал задания на ток UЗТ. Сформированный ток двигателя создаст момент, и двигатель начнет отрабатывать сигнал задания до тех пор, пока рассогласование между ротором СД и СП не станет равным нулю d = 0, т.е. пока угол рассогласования не будет равным нулю.







