САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ
_______________________________________________________
Н.А. МАСЛЕННИКОВ, В,М, ПЕТРОВ
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА.
СБОРНИК ЗАДАНИЙ
ДЛЯ РАСЧЕТНО-ГРАФИЧЕСКИХ РАБОТ
Для студентов ФБФО, изучающих предмет в один семестр
Методические указания
Санкт-Петербург
УДК 624.014:625.08.001.24
Рецензент:
В.П. Колосов - к-т техн. наук, доцент СПбГАСУ
Н.А. Масленников, В.М. Петров Теоретическая механика. Сборник заданий для расчетно-графических работ. Методические указания – СПб: СПбГАСУ, 2016. - 27 с.
Библ.: 5 назв. Таб. 4, рис. 4.
Предназначены для студентов дневной и вечерней формы обучения
«Теоретическая механика»
Методические указания рекомендованы на заседании кафедры «Механики» от 16.10.2016 г., протокол № 2
Методические указания публикуется в
Авторской редакции
© Н.А. Масленников, В.М. Петров 2016
Содержание расчётно-графических работ
РГР № 1. Равновесие плоской системы связанных тел..
РГР № 2. Теорема об изменении кинетической энергии.
РГР № 3. Принцип возможных перемещений для определения реакций опор в шарнирной балке
Порядок получения индивидуального задания
Исходные данные для выполнения каждой работы студент выписывает из приведённых в каждом задании таблиц и схем в соответствии со своим шифром. Шифром являются три последних цифры номера зачётной книжки или студенческого билета. Например, номер зачётной книжки 18549: первая цифра шифра –5, вторая –4, третья –9.
Общие требования к оформлению расчётно-графических работ
Расчётно-графическая работа выполняется на стандартных листах писчей бумаги (формат А–4). Заполняется только одна сторона листа.
(см. приложение 1, стр.32). На титульном листе указываются номер и название работы, фамилия, имя и отчество студента, номера группы и специальности, индивидуальный шифр. Работа должна быть сброшюрована. Расчётная схема изображается в масштабе длин. На ней указываются все необходимые данные в численном виде (размеры, нагрузки и др.), которые выписываются из таблиц. Все расчёты приводятся в краткой форме.
Небрежно выполненные и выполненные не по шифру работы к проверке не принимаются.
Рекомендуемая литература
1. Павлов В.Е. Теоретическая механика: учеб. Пособие для студ. Высш. Учеб. Заведений /В.Е. Павлов, Ф.А. Доронин. – М.: Издательский центр «Академия», 2009. – 320 с.
2. Бутенин Н.В., Яков Л., Меркин Д.Р. Курс теоретической механики. В 2-х томах. 10 изд. – М.:Лань, 2009.
3. Сборник задач для курсовых работ по теоретической механике под ред. А.А. Яблонского. – М.: ЕЕ Медия, 2012. – 388 с.
4. Мещерский И. Задачи по теоретической механике. - М.:Лань, 2009.
5. Масленников Н.А. и др. Сборник заданий и руководство по выполнению курсовой работы по статике. Учебное пособие. – СПб: Петербургский гос. Ун-т путей сообщения, 2004. – 68 с.
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА № 1
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА № 2
Пример расчёта
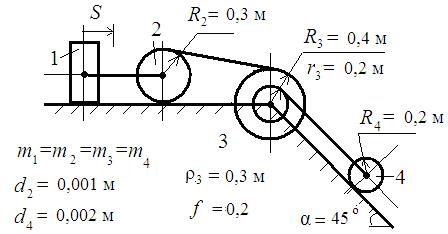
Определить скорость, которую приобретает тело 1, начинающее движение из состояния покоя и проделавшее путь S = 2м. Массы всех тел приять равными.
f – коэффициент трения скольжения,
d 2 и d 4 - коэффициенты трения качения,
m – масса тел,
ρ3 – радиус инерции блока 3.
• Теорема об изменении кинетической энергии системы:
Т - То =  +
+  ; То = 0; = 0;
; То = 0; = 0;
Следовательно, Т = .
• Для определения кинетической энергии Т и суммы работ внешних сил изображаем систему в конечном положении.
• Устанавливаем кинематическое соотношение между скоростями и перемещениями точек системы, выражая скорости и перемещения тел через скорость и перемещение тела 1.
примем: R 3 = 0,4 м = R; тогда r 3 = 0,2 м = 0,5 ∙ R; R 4 = 0,2 м = R; R 2 = 0,3 м = 0,75∙ R;
• примем: V 1 = V; так как нити нерастяжимы, то V 2 = V 1 = V, VА = V 2= V; VВ = 0,5 ∙ VА = 0.5 V; V 4 = VВ = 0,5∙ V

V 2 = ω2 ∙ R 2; V 2 = V; R 2= 0.75 ∙ R; ω2 =  = 1,333 ∙
= 1,333 ∙  ;
;
V 3 = ω3 ∙ R 3; V 3 = V; R 3 = R; ω3 = ;
V 4 = ω4 ∙ R 4; V 4 = 0,5 ∙ V; R 4 = 0,5 ∙ R; ω4 = ;
• примем S 1 = S; так как нити нерастяжимы, то S 2 = S 1 = SA = S 3 = S;
S 2 = φ2 ∙ R 2; R 2 = 0,75 ∙ R; S 2 = S; φ2 =  = 1,333 ∙
= 1,333 ∙  ;
;
S 3 = φ3 ∙ R 3; R 3 = R; S 3 = S; φ3 = ;
S B = φ3 ∙ r 3; r3 = 0,5 ∙ R 3 = 0,5 ∙ R; S B = ∙ 0.5 ∙ R = 0,5 ∙ S;
так как нити нерастяжимы, то S 4 = S B = 0.5 ∙ S.
S 4 = φ4 ∙ R 4; R 4 = 0,5 ∙ R; φ4 = ;
• Вычисляем кинетическую энергию системы в конечном положении, как сумму кинетических энергий всех тел: Т = Σ Тi.
Т 1 =  ∙ m 1 ∙ V 12 = ∙ m ∙ V 2 = 0,5 ∙ m ∙ V 2 ;
∙ m 1 ∙ V 12 = ∙ m ∙ V 2 = 0,5 ∙ m ∙ V 2 ;
Т 2 = ∙ m 2 ∙ V 22 + ∙ I 2 ∙ ω22 = ∙ m ∙ V 2 + ∙ 0,28 ∙ m ∙ R 2 ∙ (1,33 ∙ )2 = 0,75 ∙ m ∙ V 2;
I 2 = ∙ m 2 ∙ R 22 = ∙ m ∙ (0,75 ∙ R)2 = 0,28 ∙ m ∙ R 2;
Т 3 = ∙ I 3 ∙ ω32 = ∙ 0,5625 ∙ m ∙ R 2 ∙ ()2 = 0,28 ∙ m ∙ V 2;
I 3 = m 3 ∙ ρ32 = m ∙ (0,75 ∙ R)2 = 0.5625 ∙ m ∙ R 2;
(ρ3 = 0,3 м = 0,75 ∙ R);
Т 4 = ∙ m 4 ∙ V 42 + ∙ I 4 ∙ ω42 = ∙ m ∙ (0,5 ∙ V)2 + ∙ 0,125 ∙ m ∙ R 2 ∙ ()2 = 0,1875 ∙ m ∙ V 2;
I 4 = ∙ m 4 ∙ R 42 = ∙ m ∙ (0,5 ∙ R)2 = 0.125 ∙ m ∙ R 2;
T = T 1 + T 2 + T 3 + T 4 = 0,5 ∙ m ∙ V 2 + 0,75 ∙ m ∙ V 2 + 0,28 ∙ m ∙ V 2 + 0,1875 ∙ m ∙ V 2
T = 1,72 ∙ m ∙ V 2
• Чертим схему системы с приложенными к ней внешними силами.
Так как по условию m 1 = m 2 = m 3 = m 4 = m, то G 1 = G 2 = G 3 = G 4 = G;
• Определяем сумму работ внешних сил, приложенных к системе, на заданном её перемещении.
Работа сил сцепления Fcц 2 и Fcц 4 равна нулю, так как эти силы приложены в неподвижных точках (мгновенных центрах скоростей тел 2 и 4).
ΣА = А 1тс + А 2тк + А 4тк + А 4 G.

Работа силы трения скольжения тела 1: (R = 0,4 м, S = 2 м)
А 1тс = – F1тс ∙ f ∙ S = – G ∙ f ∙ S = – 0.2 ∙ 2 ∙ G = – 0,4 ∙ G;
Работа пары сил сопротивления качению катка 2:
А 2тк = – М 2тк ∙ φ2 = – N 2 ∙ d 2 ∙ φ2 = – G ∙ 0,001 ∙ 1,333 ∙ =
– 0,0013 ∙ G ∙ ∙  ;
;
А 2тк = – 0,0067 ∙ G;
Работа пары сил сопротивления качению катка 4:
А 4тк = – М 4тк ∙ φ4 = – N 4 ∙ d 4 ∙ φ4= – G ∙ cos45o ∙ 0,002 ∙ =
– G ∙ 0,707 ∙ 0,002 ∙ ;
А 4тк = – 0.0071 ∙ G;
Работа силы тяжести катка 4:
А 4 G = – G ∙ cos45o ∙ S 4 = – G ∙ 0,707 ∙ 0.5∙ S = – 0,707 ∙ 0,5 ∙ 2 ∙ G =
– 0,707 ∙ G;
А = – 0,4 ∙ G – 0,0067 ∙ G – 0,0071 ∙ G – 0,707 ∙ G = 1,121 ∙ G =
1,121 ∙ m ∙ g = 11 ∙ m;
• Используя теорему об изменении кинетической энергии, определяем скорость, которую приобретает тело 1: 1,72 ∙ m ∙ V 2 = – 11 ∙ m;
V = 2,53 
Пример расчёта
Для составной балки (рис.а), на которую действуют силы, указанные на схеме, определить реакции опор А, С и Е.
• Заменяем равномерно - распределённую нагрузку сосредоточенной силой Q = q ∙ a = 1 ∙ 2 = 2 кН.

• Определяем реакцию опоры Е. (рис. б).
Отбрасываем опору Е, заменяя её реакцией RE. Балка DE повернётся вокруг цилиндрического шарнира D на бесконечно малый угол δφ1. Все остальные точки не имеют возможных перемещений.
Чертим схему возможных перемещений.

Из подобия треугольников: δ sq = 0,5 ∙ δ sE;
Составляем уравнение работ и решаем его, определяя искомую реакцию: = RE ∙ δ sE – Q ∙ δ sq = 0; RE ∙ δ sE = 2 ∙ 0,5δ sЕ; RE = 1кН
• Аналогично определяем реакцию опоры С. (рис. в).
Опору С заменяем реакцией RС. Балка DE повернётся на бесконечно малый угол δφ3 вокруг цилиндрического шарнира Е, а балка BD - вокруг шарнира В на угол δφ2. Все остальные точки не имеют возможных перемещений. Чертим схему возможных перемещений.

Из подобия треугольников: δ sq = δ sС = 0,5 ∙ δ sD;
= 0; RС ∙ δ sС – F 2 ∙ δ sС - Q ∙ δ sq = 0;
RС ∙ 0,5 ∙ δ sD – 4 ∙ 0,5 ∙ δ sD – 2 ∙ 0,5 ∙ δ sD = 0; RC = 6 кН;
• Определяем горизонтальную составляющую реакции опоры А
(рис. г). Для этого заменяем жёсткое защемление опорой в виде ползуна, жёстко скреплённого с балкой. Такая опора позволяет исключить горизонтальную связь опоры А, которая компенсируется реакцией ХА, но не допускает вертикальное перемещение и поворот. В этом случае система получает одну степень свободы.
А возможные перемещения будут только горизонтальными, одинаковыми для всех тел – δ s.

Уравнение работ получает вид: = 0;
ХА ∙ δ s – F 1 ∙ cos45o ∙ δ s = 0; XA – 2 ∙ 0,707 = 0; ХА = 1,414 кН;
• Определяем вертикальную составляющую реакции опоры А (рис. д).
Для этого ползун располагаем вертикально, и вертикальная связь компенсируется вертикальной реакцией YА (по аналогии с предыдущей горизонтальной связью).
При сообщении системе возможных перемещений балка АВ получит поступательное вертикальное перемещение, балка ВD повернётся вокруг цилиндрического шарнира С, а балка DЕ - вокруг шарнира Е.

Из подобия треугольников: δ sА = δ s 1 = δ sB =δ sD; δ sq = 0,5 ∙ δ sD;
Уравнение работ получает вид: = 0;
YА ∙ δ sА – F 1 ∙ sin 45o ∙ δ s 1 + Q ∙ δ sq = 0; YA – 2 ∙ 0,707 + 2 ∙ 0,5 = 0;
YА = 0,414 кН;
• Определяем реактивный момент опоры А. Для этого заменяем жёсткое защемление шарнирно-неподвижной опорой, а отброшенную связь – реактивным моментом МА. (рис. е).
Даём системе возможные перемещения и определяем зависимости между ними.

δ sB = δ sD = δ s = 2а ∙ δφ = 4 ∙ δφ; δ sq = δ s 1 =0,5 ∙ δ s = 2 ∙ δφ;
= 0; МА ∙δφ – m ∙ δφ – F 1 ∙ sin 45o ∙ δ s 1 + Q ∙ δ sq = 0;
МА ∙ δφ – 6 ∙ δφ – 2 ∙ 0.707 ∙ 2 ∙ δφ + 2 ∙ 2 ∙ δφ = 0; МА = 4,824кН∙м;
ПРИЛОЖЕНИЕ
Образец оформления первого листа расчета
(формат листа А-4)

Образец оформления последующих листов расчета
(формат листа А-4)

Содержание
РГР № 1. Равновесие плоской системы связанных тел ……… 4
РГР № 2. Теорема об изменении кинетической энергии ……….. 7
РГР № 3. Принцип возможных перемещений для определения реакций опор в шарнирной балке ………………………………………15
ПРИЛОЖЕНИЕ…………………………………………………… 20
Масленников Никита Александрович
Теоретическая механика.
Сборник заданий
для расчетно-графических работ
Методические указания
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ
_______________________________________________________
Н.А. МАСЛЕННИКОВ, В,М, ПЕТРОВ
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА.
СБОРНИК ЗАДАНИЙ








