Главный вектор и главный момент произвольной пространственной системы сил
Произвольная пространственная система сил – это такая система сил, линии действия которой произвольно расположены в пространстве
Главный вектор пространственной системы сил определяется так же, как в плоской статике: это вектор R, равный векторной сумме всех сил системы:

|
| R = F 1 + F 2 + … F n = F n.
| (25)
|
Модуль R главного вектора пространственной системы сил вычисляется по следующим формулам:
|
| R = √R 2 X + R 2 Y + R 2 Z,
| (26)
|
где
|
| Rx = X v =∑x;
Ry =Y v =∑y; (27)
Rz =Zv =∑z.
|
|
Рис.33
Главным моментом системы сил называется вектор M 0, равный сумме моментов (векторных)всех сил, вычисленных относительно некоторого центра (точки О)(рис.33):
Вектор R не зависит от выбора центра О, а вектор M0 при изменении положения центра О может в общем случае изменяться.
Величина главного момента M 0 системы сил относительно центра O (начала координат) и егопроекциина оси координатвычисляются по формулам:
|
| M X = momXF v;
M Y = momYF v;
M Z = momZF v;
M0 = √M2X + M2Y + M2Z.
| (29)
|
Для простых случаев проекции главного момента системы сил относительно координатных осей и начала координат могут определяться геометрически.
Пример.
К вершинам куба (рис.34) с длиной ребра a приложена система четырех сил, действующих вдоль ребер куба и имеющих одинаковые модули: F 1= F 2= F 3= F 4= F.
Определить главный вектор этой системы сил и её главный момент относительно вершины О.
Рис.34.
Решение. Выберем декартову прямоугольную правую систему координат O xyz, оси которой ориентированы вдоль ребер куба.
Силы F 3, F 4 образуют пару сил с моментом M 34, направленным в положительном направлении оси Ox (точка приложения вектора M 34 может быть выбрана произвольно) и равным по модулю M 34 = F · a. Следовательно, силы F 3 и F 4 можно не учитывать при вычислении проекций главного вектора R.
Вычислим проекции главного вектора R на оси координат и его модуль:
RX = F 1x + F 2x = 0 - F 2 = -F;
RY = F 1y + F 2y = 0;
RZ = F 1 z + F 2 z = F + 0 = F.
R = (RX + RY + RZ)1/2=√2 F.
Определим геометрически проекции главного момента M 0 на оси координат(напомним, что момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости), проецируя на оси координат M 34:
MX = MX(F 1) + MX(F 2) + (M 34)X= 0 + 0 + M34 = F a;
MY = MY(F 1) + MY(F 2) + (M 34)Y = 0 + 0 + 0 = 0;
MZ = MZ(F 1) + MZ(F 2) + (M 34)z = 0 + F·OA + 0 = F a;
Модульглавного момента равен:
M 0 = √ M 2 X + M 2 Y + M 2 Z =√2 F· a.
Таким образом, для заданной системы сил её главный вектор R и главный момент M 0 относительно точки О равны по модулю R = √2 F; M 0= √2 F · a, лежат в плоскости Oxz и образуют с осью Oz углы в 45° (см. рис.34).
5.2. Теорема о приведении произвольной пространственной системы сил
Под приведением в механике понимают замену данной системы сил простейшей ей эквивалентной.
Произвольная пространственная система сил, действующих на абсолютно твердое тело, эквивалентна в общем случае силе, равной сумме всех сил системы и приложенной в произвольно выбранном центре приведения и паре сил, момент которой равен сумме моментов всех сил системы вычисленных относительно этого центра приведения.
Доказательство.
Пусть произвольная пространственная система сил:
F1,F2…Fn
A1, A2…An.
приложена к абсолютно твердому телу (рис.35). Примем произвольную точку О за центр приведения. В точке О на основании второй и третьей аксиом статики добавим к данной системе сил уравновешенную систему силподобную данной. Силы, приложенные в точке О, образуют систему сходящихся сил, которую в общем случае приводим к одной силе, равной их сумме. Оставшиеся силы образуют n пар сил, действия которых заменяем одной парой с моментом, равным сумме моментов этих пар.
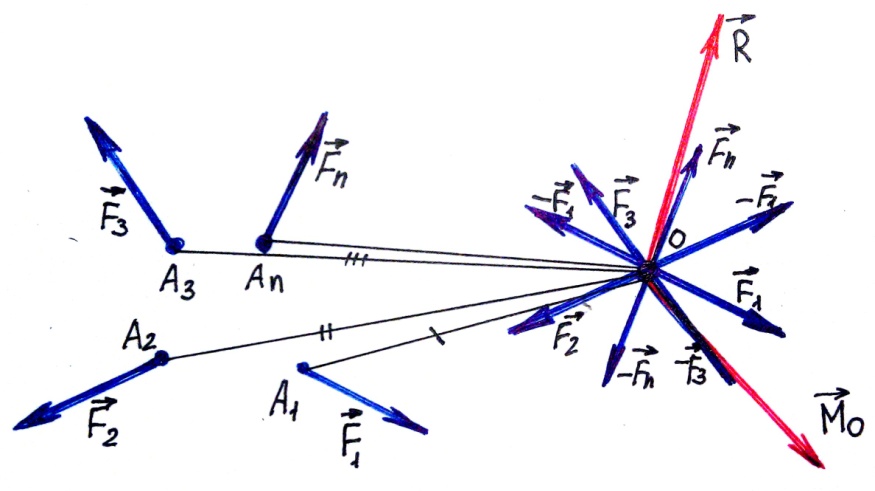
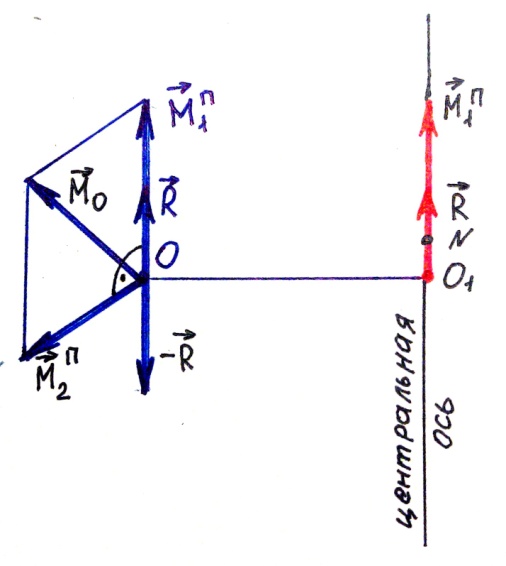
Рис.35Рис.36
Запишем приведенное доказательство:

R = F 1 + F 2 + … F n = F v - главный вектор.
MП = mom0 F v = M 0 -главный момент.
5.3.Инварианты произвольной системы сил
Величины, которые остаются неизменными при каком-либо преобразовании, называются инвариантами по отношению к этому преобразованию.
Под инвариантами системы сил понимают величины, которые не изменяются при перемене центра приведения этой системы.
Первый инвариант – векторный инвариант - главный вектор произвольной системы сил не зависит от выбора центра приведения.
R = F v.
Второй инвариант – скалярный инвариант – скалярное произведение главного вектора на главный момент, вычисленный относительно произвольной точки не зависит от выбора центра приведения.
(RMN) = (RMM).






























