

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Производится с помощью программного продукта SISO Design Tool, входящего в комплекс программ MATLAB.
Задаем требуемую систему управления, собираем математическую модель системы в Simulink, после чего соединяем ее с SISO Design Tool через LTI Viewer и экспортируем в рабочую область:

Рис.2.Структурная схема основы (G)
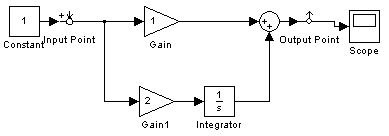
Рис.3.Структурная схема компенсатора (C)
Передаточная функция обратной связи, с учетом введенного корректирующего звена будет равна единице.
Необходимо обратить внимание на то, что передаточная функция регулятора, при переносе ее в SISO Design Tool, будет преобразована. Получившеюся передаточную функцию регулятора можно увидеть на вкладке Compensator Editor. На поле ввода Compensator Editor явным образом может быть задан коэффициент ки. Значение коэффициента кп может быть вычислено следующим образом:

Определяются границы устойчивости системы. То есть необходимо определить, при каких значениях ки будет наблюдаться случаи, когда ΔL = 0 Дб. Поскольку регулируемых параметра два, то получим двумерную границу устойчивости.
С учетом особенностей программы, зададимся значениями кИ а полученные значения кп будем вычислять для найденной границы устойчивости. Найденные значения будем записывать в таблицы 1 и 2.
Для нахождения границы устойчивости с установленным значением ки будем перемещать ТОЛЬКО полюс передаточной функции регулятора. Поскольку полюс можно перемещать как влево в сторону уменьшения частоты, так и вправо в сторону увеличения частоты, то границу устойчивости, найденную на меньших частотах будем называть «левой границей», а границу, найденную на больших частотах «правой границей».
Наличие одновременно двух границ не обязательно, как не обязательно и отсутствие одной из границ. Также не следует забывать о существовании границ допустимых значений коэффициентов регулятора.
Таблица 1
|
Ки | Левая граница | Правая граница | ||
| Кп/Ки | Кп | Кп/Ки | Кп | |
| 0,1 | 880 | 88 | - | - |
| 0,5 | 160 | 80 | - | - |
| 0,7 | 120 | 84 | - | - |
| 1 | 78 | 78 | - | - |
| 1,2 | 62 | 74,4 | 0,42 | 0,5 |
| 1,6 | 41 | 65,6 | 8,7 | 13,9 |

Рис.4. Границы устойчивости системы и область допустимых значений коэффициентов регулятора
Определение границ устойчивости для требуемых запасов устойчивости и допустимых значений коэффициентов регулятора
Необходимо добиться ΔL > 15 Дб, Δφ> 45°, σ<10%.
Таблица 2
|
Ки | Левая граница | Правая граница | ||
| Кп/Ки | Кп | Кп/Ки | Кп | |
| 0,01 | 1600 | 16 | - | - |
| 0,02 | 780 | 15,6 | - | - |
| 0,03 | 520 | 15,6 | - | - |
| 0,04 | 390 | 15,6 | - | - |
| 0,05 | 310 | 15,5 | - | - |
| 0,07 | 220 | 15,4 | - | - |
Найденные границы отображаются на графике требуемых границ устойчивости (Рис.5).
Рис.5. Границы устойчивости системы и область допустимых значений коэффициентов регулятора и границы допустимых значений с учетом требований устойчивости
|
|
|

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

