В соответствии с формулой (4.7) скорость вращения двигателя при заданном моменте сопротивления на валу можно регулировать тремя способами: изменением сопротивления в цепи якоря RР = v α r, изменением магнитного потока Ф(IВ) = v α r и изменением напряжения питания U = v α r.
Первый способ (RР = v α r)
При изменении сопротивления в цепи якоря скорость холостого хода  остается неизменной, а наклон механической характеристики увеличивается с увеличением сопротивления (рис. 4.17).
остается неизменной, а наклон механической характеристики увеличивается с увеличением сопротивления (рис. 4.17).
Если в цепи якоря отсутствует регулировочное сопротивление (RР = 0), то такая характеристика называется естественной. При нагрузке МС двигатель будет развивать скорость ω. При включении различных сопротивлений (RР 1, RР 2) скорость вращения (при данной нагрузке) будет уменьшаться с увеличением сопротивлений.
Преимуществом этого способа регулирования является его простота, основным недостатком – неэкономичность. Действительно, регулирование производится в силовой, сильноточной цепи (цепи якоря). При этом требуется большого габарита реостат, который будет выделять значительную тепловую энергию, бесполезно рассеиваемую в пространстве.

Рис. 4.17. Механические характеристики двигателя при изменении сопротивления
в цепи якоря
Кроме того, при увеличении сопротивления механические характеристики становятся более «мягкими», т.е. при небольших колебаниях нагрузки скорость привода резко изменяется. Это сокращает диапазон регулирования. Считается, что минимальная скорость при номинальном моменте определяется на той механической характеристике, на которой двойная номинальная нагрузка вызывает полную остановку двигателя. Диапазон регулирования определяется отношением максимальной скорости к минимальной. При таком способе регулирования он не превышает двух: Д = ωmax/ωmin ≈ 2:1.

| Рис. 4.18. Регулировочная характеристика холостого хода
|
Наконец, регулировать скорость этим способом можно только «вниз» от основной скорости. С учетом таких существенных недостатков этот способ можно применять в приводах небольшой мощности, где экономический фактор не играет большой роли.
Второй способ: Ф(IВ) = v α r
Изменять магнитный поток можно только уменьшая его по отношению к номинальному, т.к. магнитную индукцию в номинальном режиме выбирают на изгибе кривой намагничивания, после которого наступает насыщение. Для того чтобы даже незначительно увеличить магнитный поток, необходимо резко увеличить ток возбуждения. При уменьшении магнитного потока скорость холостого хода возрастает. Зависимость скорости вращения двигателя в режиме холостого хода от тока возбуждения при номинальном напряжении называется регулировочной характеристикой (рис. 4.18). С уменьшением тока возбуждения (магнитного потока) скорость резко возрастает. Поэтому обрыв в цепи возбуждения в режиме холостого хода является аварийным режимом, когда электродвигатель «идет вразнос». По этой же причине нельзя пускать двигатель последовательного возбуждения без нагрузки.
При уменьшении магнитного потока увеличивается и наклон механической характеристики, которая становится более «мягкой». При этом способе регулирования при уменьшении магнитного потока скорость вращения может возрастать до величины ω′1, если нагрузка небольшая (МС 1),но при больших нагрузках (МС 2) скорость вращения будет уменьшаться до ω′2 (рис. 4.19).
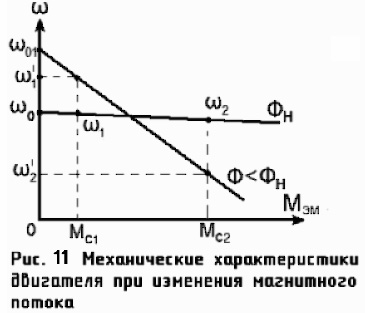
| Рис. 4.19. Механические
характеристики двигателя при изменении магнитного потока
|
Преимуществом данного способа регулирования является экономичность, т.к. регулируют ток в цепи возбуждения, который на порядок – два меньше тока цепи якоря.
Небольшой диапазон регулирования ограничивает область применения этого способа.
Наиболее современен способ регулирования скорости вращения двигателя изменением напряжения сети.
Третий способ (U = υ α r)

| Рис. 4.20. Механическая
характеристика двигателя при изменении напряжения сети
|
Пусть при номинальном напряжении сети и моменте сопротивления
МС скорость вращения двигателя соответствовала ω, а скорость холостого хода ω
0. (рис. 4.20).
Если уменьшить (U 1) или увеличить (U 2) напряжение сети, то и скорость двигателя в режиме холостого хода и под нагрузкой МС станут равными соответственно ω01, ω1 и ω02, ω2.
При этом наклон характеристик не изменится. Благодаря тому, что жесткость механической характеристики сохраняется, значительно возрастает и диапазон регулирования, который может достигать значения 10:1. Этот способ позволяет регулировать вращение как «вниз», так и «вверх» от основной скорости.








