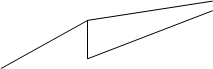
А теперь рассмотрим пример стратегии погони. Цель стратегии параллельного сближения заключается в том, чтобы обеспечить преследователю максимальное сближение с убегающим игроком. Ниже на картинке показаны возможные траектории преследователя и убегающего игрока при использовании стратегии параллельного преследования.
Обратите внимание, что отрезки соединяющие точки, в которых произошла смена направления движения, параллельны друг другу. Этот факт и дал название стратегии.
Почему именно так. Рассмотрим какой-либо участок движения на котором оба участника погони движутся по прямым. Их поведение оптимально, это означает, что они движутся к точке встречи расположенной на соответствующей окружности Апполония (обозначим её А1) и это означает (см. выше), что любые два отрезка соединяющие положение убегающего и догоняющего параллельны.
Пусть теперь убегающий игрок сменил направление. Иначе говоря он перешел к другой окружности Апполония (обозначим её А2). Пусть А точка в которой сменил направление убегающий игрок и В точка в которой сменил направление догоняющий игрок. Тогда отрезок АВ конец пути по траектории на А1 и начало пути по траектории А2. Следовательно любой отрезок на траектории А1 параллелен АВ и в то же время любой отрезок на траектории А2 также параллелен АВ. Таким образом, параллельность отрезков соединяющих соответствующие точки на траектории убегающего и догоняющего игроков сохраняются и при смене направления движения.
Один кролик и несколько лис
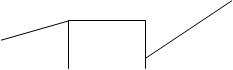
Вспомним задачу с которой началась работа. Один кролик пытается убежать от группы лисиц. Известно, что кролик бегает быстрее лисиц. Ситуация в которой все лисицы находятся в одной полуплоскости от кролика можно считать неинтересной. Его скорость выше и он непременно убежит. Какой-то шанс у лисиц появляется, если им каким-либо образом удастся кролика окружить. Вот так:
Конечно, сам по себе факт окружения кролика успеха лисам не гарантирует. Совершенно очевидно, что нужно ещё что-то. Нужно видимо какое-то специальное отношение расстояний, отношение скоростей. В общем, между различными факторами образующими ситуацию, необходима какая-то закономерность.
Основой, известного нам, математического аппарата является окружность Апполония, но как мы помним из предыдущей лекции она строилась из тех соображения, что преследователь быстрее убегающего, в противном случае множество точек встречи просто пустое. Поэтому на первый взгляд использовать окружность Апполония не получится.
Проведём небольшое формальное преобразование. Пусть кролик будет преследователем, а лиса убегающим, а чтобы эту новую задачу свести к предыдущей добавим в условие, что все направления движения от кролика для лисы запрещены и двигаться она может только к кролику, а кролику разрешено движение только по прямой из исходной точки. С точки зрения здравого смысла такая постановка абсурдна, но как математики, мы имеем право так поступить. Новая задача будет выглядеть так: Несколько лис окружили кролика который пытается поймать хотя бы одну. Лисы не возражают и ведут себя так, чтобы максимально облегчить задачу кролика. Вопрос, при каких условиях на любом направлении движения кролика по прямой, лисы смогут осуществить встречу кролика хотя бы с одной лисой.
В такой постановке ответ почти очевиден. Кролик гарантированно встретится с хотя бы одной лисой, если любая прямая по которой он движется пересечёт хотя одну окружность Апполония. То есть имеет место следующая ситуация:
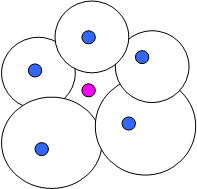
Рисунок сделан с учётом того, что скорости лис могут быть различные, различие в скоростях лис определяет различие в радиусах. Совокупность окружностей Апполония ограничивают замкнутую внутреннюю область в которой располагается кролик.
Чтобы сложилась такая ситуация необходимо какое-то соотношение между скоростями лис, кролика и расстояниями между ними. А для того, чтобы получить возможность что-либо считать нам нужен радиус окружности Апполония.
Радиус окружности Апполония:
Для того чтобы получить радиус построим формулу описывающую окружность.
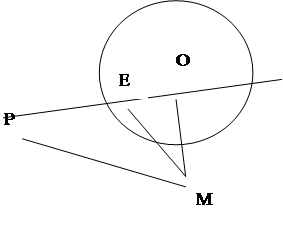
Обозначения:
P – Преследователь
E – Убегающий игрок
O – Центр окружности Апполония
M – Точка встречи
Выберем систему координат таким образом, чтобы её начало было в центре окружности Апполония и E=(0,0); P=(0, – b)
Очевидно, что |EM|/Ve= |PM|/Vp
Или, что тоже самое |EM|* Vp = |PM|* Ve
Тогда |EM| = Öx2 + y2 и |PM| = Ö x2 + (y +b)2
Подставим в предыдущую формулу и получим
VpÖx2 + y2 = VeÖ x2 + (y +b)2
Возведём в квадрат обе части уравнения, сгруппируем и получим следующее уравнение
x2 + (y – (bVe2)/(Vp2 – Ve2))2 = (Ve Vp b/(Vp2 – Ve2))2
Это действительно уравнение окружности и отсюда мы можем получить выражение для радиуса.
R = Ve Vp b/(Vp2 – Ve2)
Из этого же уравнения можно определить и координаты преследователя и убегающего игрока
Знание этих величин, и скоростей позволяет решить целый ряд задач. Например следующую:
Три лисы окружили кролика таким образом, что кролик оказался в центре окружности описанной возле равностороннего треугольника, в вершинах которого находятся лисы. Известно также, что скорости всех лис одинаковы и известно, что кролику не удастся убежать, причем, если бы его скорость была хотя бы немного больше он бы убежал. Найти отношение скорости лис и скорости кролика.