Программа вычисления частотных характеристик в системе MathLab выглядит следующим образом:

Полученные амплитудная и частотная характеристики изображены на рисунках 2 и 3 соответственно.

Рис.2. АЧХ полученного фильтра.

Рис.3. ФЧХ полученного фильтра.
Импульсная характеристика фильтра есть отклик фильтра на единичный импульс, т.е. значения импульсной характеристики будут повторять коэффициенты фильтра.
Программа вычисления импульсной характеристики в системе MathLab выглядит следующим образом:

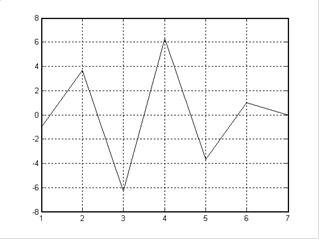
Рис.4. Импульсная характеристика полученного фильтра.
Полученная импульсная характеристика изображена на рисунке 4:
Переходная характеристика фильтра есть отклик фильтра на единичный скачок. Программа вычисления переходной характеристики в системе MathLab выглядит следующим образом:

Полученная переходная характеристика изображена на рисунке 5.

Рис.5. Переходная характеристика полученного фильтра.
Анализ ошибок квантования в цифровом фильтре и методов их минимизации
В реальных устройствах цифровой обработки сигналов необходимо учитывать эффекты, обусловленные квантованием входных сигналов и конечной разрядностью всех регистров. Источниками ошибок в процессах обработки сигналов являются округление (усечение) результатов арифметических операций, шум аналого-цифрового квантования входных аналоговых сигналов, неточность реализации характеристик цифровых фильтров из-за округления их коэффициентов (параметров). В дальнейшем с целью упрощения анализа предполагается, что все источники ошибок независимы и не коррелируют с входным сигналом.
Эффекты квантования приводят в конечном итоге к погрешностям в выходных сигналах цифровых фильтров, а в некоторых случаях и к неустойчивым режимам ЦФ. Выходную ошибку ЦФ будем рассчитывать как суперпозицию ошибок, обусловленных каждым независимым источником.
Квантование чисел является нелинейной операцией; m-разряд-ное двоичное число А представляется b -разрядным двоичным числом B = F (A), причем b <т. В результате квантования число А представляется с ошибкой
e = B - A = F (A)- A (2.1)
Шаг квантования Q определяется весом младшего числового разряда  При квантовании используется усечение или округление.
При квантовании используется усечение или округление.
Усечение числа А состоит в отбрасывании  младших разрядов числа, при этом ошибка усечения
младших разрядов числа, при этом ошибка усечения
 (2.2)
(2.2)
Оценим величину ошибки в предположении  . Для положительных чисел при любом способе кодирования
. Для положительных чисел при любом способе кодирования  . Для отрицательных чисел при использовании прямого и обратного кодов ошибка усечения неотрицательна:
. Для отрицательных чисел при использовании прямого и обратного кодов ошибка усечения неотрицательна:  , а в дополнительном коде эта ошибка неположительна:
, а в дополнительном коде эта ошибка неположительна:  . Таким образом, во всех случаях абсолютное значение ошибки усечения не превосходит шага квантования:
. Таким образом, во всех случаях абсолютное значение ошибки усечения не превосходит шага квантования:
 (2.3)
(2.3)
Округление m-разрядного числа А до b разрядов (  ): b -й разряд остается неизменным или увеличивается на единицу в зависимости от того, больше
): b -й разряд остается неизменным или увеличивается на единицу в зависимости от того, больше  или меньше
или меньше  отбрасываемая дробь 0,
отбрасываемая дробь 0,  , где ai - i -й разряд числа А,
, где ai - i -й разряд числа А,  . Округление можно практически выполнить путем прибавления единицы к (b +1)-му разряду и усечения полученного числа до b разрядов. В таком случае ошибка округления
. Округление можно практически выполнить путем прибавления единицы к (b +1)-му разряду и усечения полученного числа до b разрядов. В таком случае ошибка округления  при всех способах кодирования лежит в пределах
при всех способах кодирования лежит в пределах
 (2.4)
(2.4)
и, следовательно,
 (2.5)
(2.5)

Рис.6. Плотности вероятностей для ошибок квантования при округлении(слева) и усечении (справа).
В задачах ЦОС ошибки квантования чисел рассматриваются как стационарный шумоподобный процесс с равномерным распределением вероятности по диапазону распределения ошибок квантования. На рисунке 6приведены плотности вероятности ошибки квантования при округлении и усечении.
Квантование дискретных сигналов (в АЦП и цифровых сигналов на выходах умножителей и сумматоров) состоит в представлении отсчета (выборки сигнала) числами х(пТ), содержащими b числовых разрядов. Квантование сигналов, как и квантование чисел, является нелинейной операцией. Однако при анализе процессов в ЦФ используется линейная модель квантования сигналов (рисунок 7), где f (nT) - дискретный или m-разрядный цифровой сигнал (m > b), x (nT) - квантованный b - разрядный цифровой сигнал, ошибка квантования е (п Т) = х (п Т) - f (n T).
Верхнее значение ошибки квантования  определяется по-прежнему соотношением (2.4) или (2.5).
определяется по-прежнему соотношением (2.4) или (2.5).
Вероятностные оценки ошибок квантования основаны на предположениях о том, что последовательность е(пТ) является стационарным случайным процессом с равномерным распределением вероятности по диапазону ошибок квантования и е(пТ) не коррелирован с f (nT). Математическое ожидание (среднее значение)  и дисперсия
и дисперсия  ошибки квантования е определяются по формулам:
ошибки квантования е определяются по формулам:


где ре - плотность вероятности ошибки. По этим формулам легко вычислить математическое ожидание и дисперсию для ошибок округления и усечения:
 (2.6)
(2.6)
 (2.7)
(2.7)

Рис.7. Линейная модель квантования сигналов.
Т.о. возможность снижения ошибок квантования заключается в уменьшении значения шага квантования  . Или, что эквивалентно, увеличении разрядов квантования.
. Или, что эквивалентно, увеличении разрядов квантования.








