В жизни ничего не дается даром и поэтому, простота правил регулирования, компенсируется количеством параметров, описывающих функции принадлежности. В самом деле, если для ПИД-регулятора нужно подобрать три коэффициента, то в случае нечеткой логики, только для одной треугольной функции нужно 3 числа для вершин. Если для каждой входной переменной нам нужно 3 функции принадлежности + 3 для выходной, получается, что нам нужно задать 3 x 3 x 3 + 3 x 3 = 36 параметров!
Но не все так печально. Для первого приближения и первичной настройки можно все упростить. Сделав некоторые допущения для первоначальной настройки регулятора:
· Задаем симметричность функций, относительно нуля, тогда вместо двух чисел для максимума и минимума можно задать одно – Мах, и, соответственно диапазонно будет определен как [-Мах..Мах].
· Задаем, равномерное распределение функций, тогда можно рассчитать положение всех вершин треугольников исходя из заданного диапазона.
· Для трех функций координаты вершин определятся как –Max, 0, Max.
· Задаем, что основание треугольника всех функций принадлежности одинаковы.
Таким образом, вместо 36 независимых параметров мы должны задать только 4, максимальное отклонение от 0 для трех входных переменных и одного выхода, а именно:
uMax – амплитуда управляющего воздействия (-uMax.. uMax);
deltaMax – максимальное отклонение (-deltaMax.. deltaMax);
divMax – максимальная производная отклонения (-divMax.. divMax);
div2 Max – максимальная вторая производная отклонения (-div2Max.. div2Max)
Данные параметры задаем в глобальных сигналах проекта (см. рис. 14)

Рисунок 14. Список сигналов проекта.
В функциях фазификации и нечеткого вывода используем эти сигналы для расчёта параметров с учетом принятых допущений (см. рис. 15, 16).
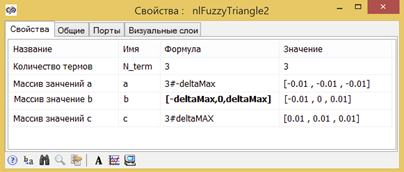
Рисунок 15. Параметры функции фазификации для отклонения.
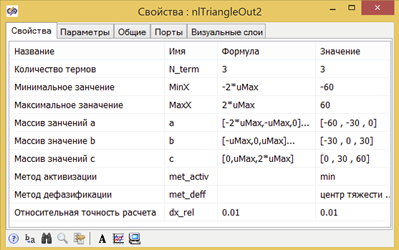
Рисунок 16. Параметры функции нечеткого вывода.
Настройки регулятора,предложенные в книге Гостева В.В. «Нечеткие регуляторы в системах автоматического моделирования», для случая фазификации тремя функциями принадлежности предлагаются следующие параметры:
uMax = 30 – амплитуда управляющего воздействия;
deltaMax = 0.01 – максимальное отклонение;
divMax = 0.07 – максимальная производная отклонения;
div2 Max = 1 – максимальная вторая производная отклонения.
Сравнение переходных процессов
На графике переходных процессов совпадение заданного воздействия и полученного результат практически полное.
 ПИД регулятор
ПИД регулятор
|  Нечеткий регулятор
Нечеткий регулятор
|
Явные отличия можно посмотреть на графиках отклонения и управляющего воздействия.
 ПИД регулятор
ПИД регулятор
|  Нечеткий регулятор (вариант 1)
Нечеткий регулятор (вариант 1)
|
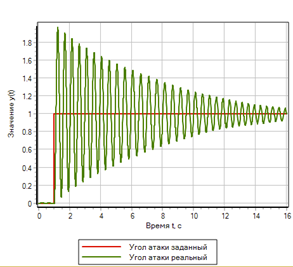
Рисунок 17. Переходные процессы.
Из сравнения рисунков видно, что нечеткий регулятор обеспечивает меньшую ошибку, и лучше отрабатывает переходной процесс.
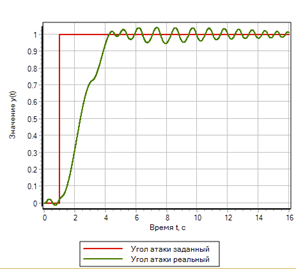
Сравним переходные процессы в системе, если задать ступенчатое управляющее воздействие. Результаты на рисунке 18.
 ПИД-регулятор
ПИД-регулятор
|  Нечеткий регулятор (вариант 1)
Нечеткий регулятор (вариант 1)
|
Рисунок 18. Переходные процессы и управляющие воздействия при ступенчатом воздействии.
Для ступенчатого воздействия, регулятор на основе нечеткой логики обеспечивает лучшее качество переходного процесса.ПИД-регулятор, настроенный автоматически на плавный процесс, вызывает колебания с перерегулированием в два раза превосходящие заданную ступеньку.








