

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Тахогенераторы бывают двух видов: синхронные и асинхронные. Различают синхронные ТГ с ротором, выполненным из постоянного магнита, и с электромагнитным возбуждением в виде короткозамкнутой обмотки типа "беличья клетка".
Из-за наличия двух основных недостатков (частота выходного напряжения зависит от скорости вращения ротора, фаза выходного напряжения не зависит от направления вращения) синхронные тахогенераторы не получили широкого распространения в системах управления.
Конструктивная схема асинхронного тахогенератора приведена на рис.2.2,а С21.

Рис. 2.2. Конструктивная схема, выходная характеристика, амплитуда, фазовая погрешность асинхронного тахогенератора
На внешнем статоре I ТГ, закрепленном в корпусе 2, располагаются две обмотки 3 (возбуждения и генераторная), сдвинутые относительно друг друга на 90°. Ротор 4, выполненный з виде тонкостенного стакана, закрепляется на оси 5 и располагается между внешним 1 и внутренним 6 статорами.
Обмотка возбуждения подключается к сети переменного тока и создает в воздушном зазоре машины пульсирующие магнитные поля. При вращении ротора в результате электромагнитной индукции в генераторной обмотке наводится Переменная трансформаторная ЭДС, амплитуда которой пропорциональна скорости вращения ротора, а частота определяется частотой напряжения возбуждения [2].
Выходная характеристика идеального тахогенератора описывается линейной зависимостью, крутизна которой определяется величиной сопротивления нагрузки (прямая 1, рис.2.2, б). Выходная характеристика реального тахогенератора является нелинейной функцией значения и характера нагрузочного сопротивления и относительной скорости вращения ротора υ* (кривые 2,3, рис.2.2,б) [2].
Асинхронные ТГ характеризуются несимметричностью выходной характеристики и смещением ее из начала координат вследствие наличия остаточной ЭДС и изменения внутренних сопротивлений ротора и обмоток статора в функции их температуры. При этом возникают погрешности отображения, фазовые графики которых приведены на рис.2.2, в, г.
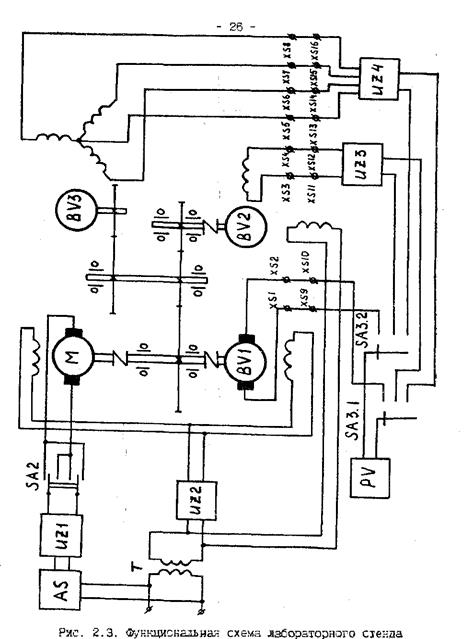
ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
Функциональная схема лабораторного стенда приведена на рис.2.3. В состав стенда входят исполнительный двигатель М (СЛ-369), вал которого соединен с входным валом редуктора Р, три датчика скорости, синхронный тахогенератор BV3, асинхронный тахогенератор BV2 (АДП 262) и тахогенератор постоянного тока BV1 (СЛ-221), соединенные через промежуточные выходные валы редуктора с валом двигателя М соответственно с передаточными отношениями i3 = 9/11, i2=19/55, i=1, вольтметр PV, регуляторы, выпрямители UZ1-UZ4, переключатели SA1-SA3, силовой трансформатор Т, предохранитель FU и лампа индикации включения питания HL.
Стенд питается от сети однофазного переменного напряжения величиной 220 В. Включение стенда осуществляется тумблером SA. При этом загорается сигнальная лампа HL. Регулирование скорости исполнительного двигателя осуществляется изменением положения задатчика RP в регуляторе AS. Смена направления вращения двигателя М осуществляется изменением полярности подключения его якоря к выходу выпрямителя с помощью переключателя SA2. Обмотки возбуждения двигателя М и датчика BV1 питаются от стабилизатора UZ2. С помощью пакетного переключателя SA3 выходные обмотки исследуемых датчиков скорости подключаются к вольтметру PV. При этом выходные напряжения синхронного BV3 и асинхронного BV2 тахогенерато-ров предварительно выпрямляются выпрямителями UZ3 и UZ2. Контроль формы выходного напряжения датчиков осуществляется осциллографом С1-55 через гнезда XS1-XS8.
ПОРЯДОК ВЫПОЛНЕНИЯ
Перевести SA1 в положение "ВКЛ.".
С помощью SA3 подключить к вольтметру PV исследуемый тип датчика.
SA2 поставить в положение "ВПЕРЕД.".
Снять выходную характеристику тахогенератора. Результаты занести в таблицу.
Подключить осциллограф к соответствующим гнездам XS, исследовать форму и определить частоту выходного напряжения тахогенератора[1].
Определить крутизну выходной характеристики ТТ. Результаты занести в таблицу.
Определить зону нечувствительности ТГ.
Определить амплитудную, фазовую погрешности ТГ во всем диапазоне скоростей, приняв за идеальную выходную характеристику, снятую в режиме холостого хода. Результаты занести в таблицу[2]'. Задачи в пп.4 - 7 выполнить для режимов работы ТГ в холостом ходе и под нагрузкой[3] (активной, активно-индуктивной и емкостной) при вращении "вперед" и "назад".
9. По результатам экспериментальных исследований построить графики выходной характеристики, погрешностей отображения и фазовой.
| Параметр | ||||||||||||||
| w | ||||||||||||||
| Uвых | ||||||||||||||
| Kтг | ||||||||||||||
| ΔU | ||||||||||||||
| Δφ |
СОДЕРЖАНИЕ ОТЧЕТА
Результаты экспериментов по пп.4 - 9 (графики, таблицы).
Выводы.
Отчет оформляется в соответствии с требованиями ЕСКД.
|
|
|

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

